
Faro Metrecom Arm
I am a computer systems engineer by trade, a programmer by education, and a roboticist by choice. The combination can lead to some strange projects. This is particularly true when you have overly optimistic sales people working for you. The things my sales people think I can do are really surprising (though I wouldn't admit it to them).
For example, a couple years back one of our guys noticed that a particular client used an old Faro Metrecom device. The thing took measurements and recorded them to a 386 desktop computer. It had all sorts of proprietary hardware and a DOS-based application besides.
Now, Faro no longer supported the Metrecom device. The Intel 386 desktop computers were rapidly aging and, therefore, the client was seeking to replace the computer, interface board, and the proprietary software. Ideally, they wanted the interface to use the ports commonly available on all desktop computers (e.g. USB). Furthermore, the software should run on the current operating systems (e.g. Windows XP).
In effect, the sales guy convinced the client that I could create a stand-alone hardware interface for the Faro Metrecom. This interface will read in the positional information, format the data, and send the output to the computer via standard computer data ports. Then, I’d whip up some custom application to dump the data into a back-end database.
It did not quite work out that way. Sure, all these things could be accomplished, given enough time and money. That was the problem; the client did not want to spend the kind of money it would take to accomplish such a feat. Nevertheless, I learned a little about the device. My findings are recorded here for posterity.
J Wolfgang Goerlich
July 2004
Some Facts:
The Faro Metrecom Arm was a 6 DOF, non-motorized device used for medical measurements. The DOF are as follows:
- Hand: 1-DOF, 320°- Wrist: 1-DOF, 320°
- Elbow: 2-DOF, 320°
- Shoulder: 2-DOF, 320°
The Metrecom connects to an Intel 386 desktop computer via a custom interface board. Proprietary DOS-based software runs on this computer and interfaces the Metrecom for positional and proportional measurements. Internal sensors for positional information may include:
- Capacitance gauge- Linear variable differential transformer (LVDT)
- Hall effect detector
- Reflected/interrupted light intensity
- Rectilinear potentiometer
Related Links:
- US Patent 4,549,555- US Patent 4,571,834
|
Faro Metrecom Arm 6 DOF, non-motorized |
 |
|
Front Panel Display Option (Push to detect) [Button] Quad [Indicator Light] Axis [Indicator Light] Aux [Indicator Light] |
 |
|
Side Profile Metrecom |
 |
|
Hand, Top Set and reset buttons |
 |
|
Hand, Bottom PS2 Data Port, Unused |
 |
|
Hand: 1-DOF, 320° Wrist: 1-DOF, 320° |
 |
|
A second view of the hand / wrist. |
 |
|
Elbow: 2-DOF, 320° |
 |
|
Shoulder: 2-DOF, 320° |
 |
|
A second view of the shoulder Shoulder: 2-DOF, 320° |
 |
|
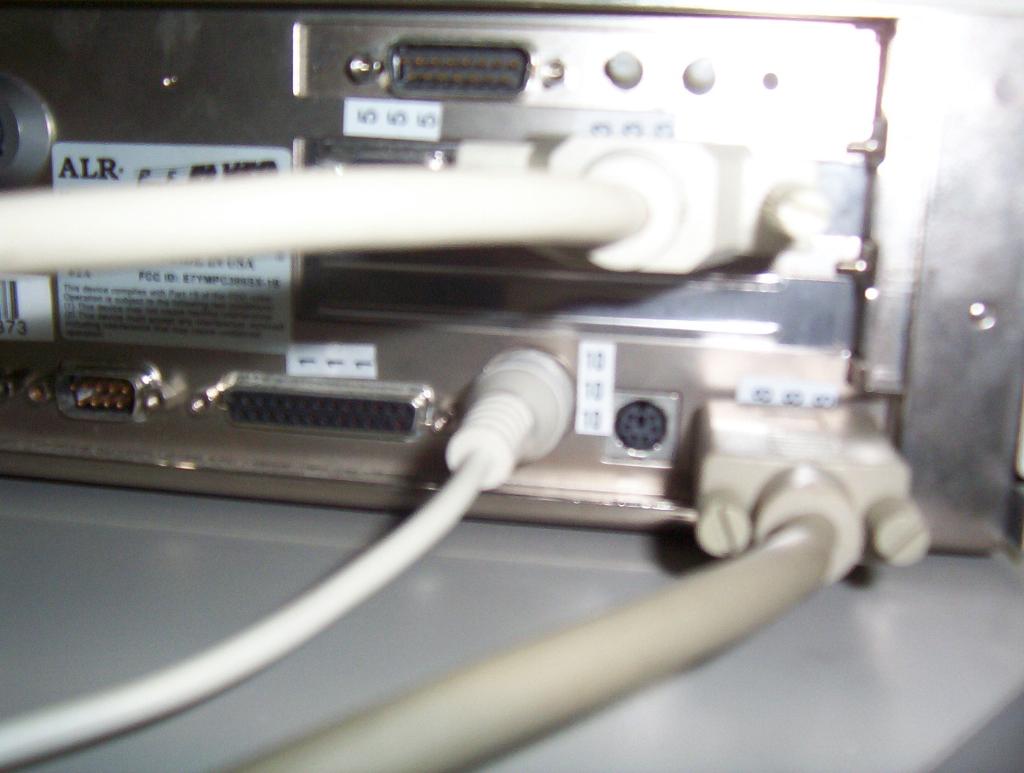
Data Ports 7 [Db15, goes to the arm base] 4 [Db25, goes to the computer on 333] Quad [Db9, Unused] Axis [Db9, Unused] Aux [Db9, Unused] |
 |
|
Faro Technologies Inc Lake Mary - FL - USA - 32746 Serial: M9290992 Model: SB/METRECOM DANGER EXPLOSION HAZARD. DO NOT USE IN THE PRESENCE OF FLAMMABLE ANESTHETICS This product is protected by Patents 4,549,555, 4,571,834 US. Worldwide Patents Issued and Pending. |
 |
|
Intel 386 Desktop Computer ALR PowerFlex Flyer Faro Medical Technologies Inc. |
 |
 |
|
|
Data port. 333 is a Db25 connector that goes to Data Port 4. |
 |
|
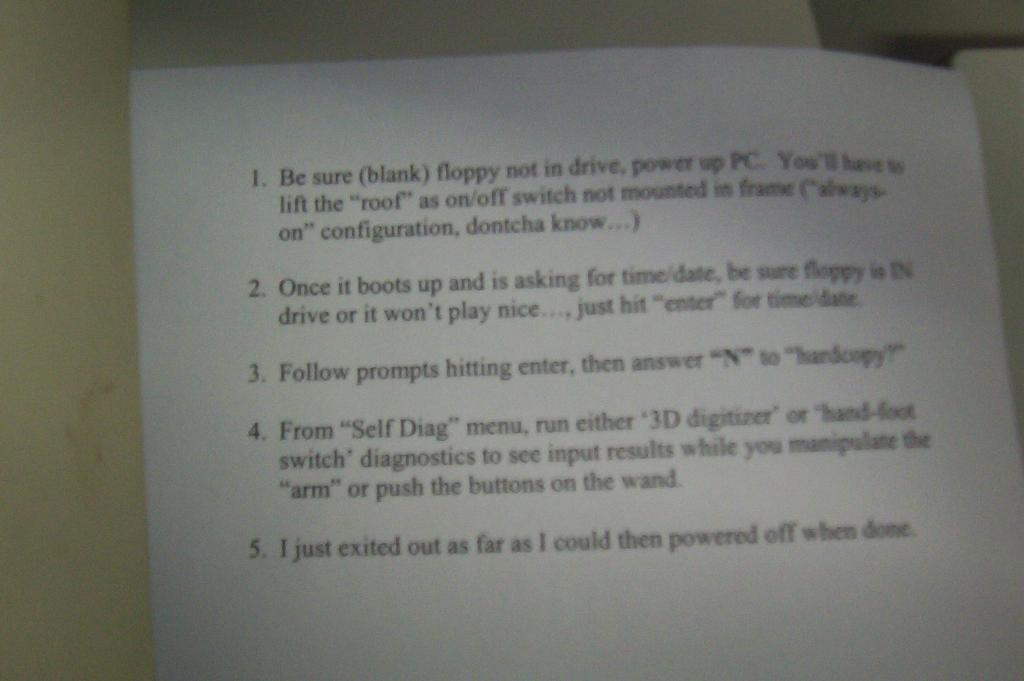
Boot instructions. |
 |