
High Entropy Beam -- Videos and Circuits
This page features Tom Jenner’s HEBEAM circuits and videos of robots running them. First, a note on the name and premise behind the family of circuits.
The most commonly used Beam controller is the Nervous Net. These drive robots or, if you will, convey information by means of pulses. Motor and motion is determined by the driving neuron’s pulse duration. Time is the one variable. If the neurons are in a Bicore, then the variables include frequency and duty cycle.
HEBEAM adds to these variables by combining Bicore-style oscillators with OISM. HEBEAM circuits have a continuously variable local and global input and a pulsed output. The continuously variable input may be a OISM type sine oscillator. The resulting controller provides pulse width with modulation. The objective is providing more information per circuit component.
What does HE stand for? High Entropy. As used in information theory, entropy is a measure of potential information. Arranging all of the characters in this page alphabetically results in greater order and less information. This conception finds uses in computer encryption, compression, data warehousing, et cetera. It can be contested (Tom mentions twelve different definitions in “Chaos Theory Tamed”) but does serve to illustrate the concept.
HEBEAM circuits increase the potential behaviors by increasing the number of motor control variables.
J Wolfgang Goerlich
December 2005
Tom Jenner's Rover Videos
Light-tracking bug (2 MB). Demonstrates a simple rover chaotically tracking the light source. See this email and accompanying photograph for details on construction.
{kind=link}
Chaotic bug (3 MB). Shows the chaos rover with no sensor input and demonstrates the inherently chaotic nature of the system.
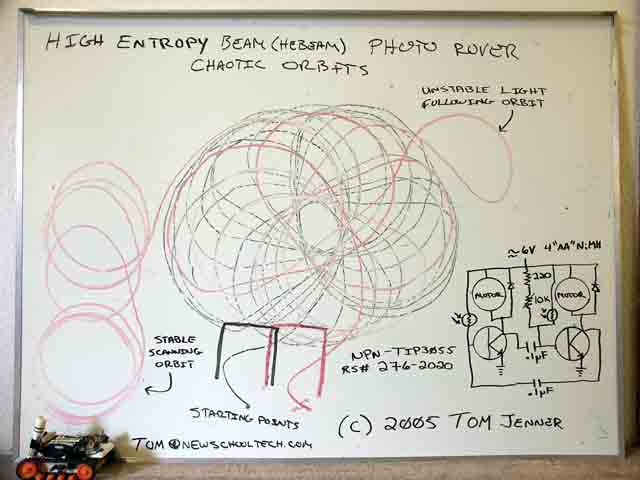
Phototaxis tank (3.7 MB). Demonstrates a tank with a photo HEBEAM circuit. The tank's motion traces out a chaotic spirograph, as shown in this photo and discussed in this email.
{kind=link}
Tank circling and turning (5 MB). Demonstrates a light following behavior and a light scanning behavior. Watch for the turning in the video, which is highly dynamic.
Beam Member's Videos
Eric Cuzzort's rover (2 MB). A 2T photo rover circuit with a pair of CdS cells in parallel for each side to keep it from stalling in the dark. Sometimes it spins in small circles near the light. Other times it turns toward the light and goes straight to it.
Eric Cuzzort's reversing rover (2 MB). As Eric explained in this email, he added two reverse circuits from the Junkbots Herbie project; a switch, relay, and timing capacitor. The reverse is straight back in the first half of the video. Afterward, the behavior is reverse and turn.
Tom Jenner's Flight Videos
1 axis, 3 transistor adaptive flight control (3.8 MB). A helicopter maintains altitude based on the light level. The circuit and a link to the description can be found below under Circuits.
2 axis, 8 transistor adaptive flight control (4 MB). A helicopter tracks light on two axes. The circuit is Tom Jenner's P-D controller. The behavior is described here.
Tom Jenner's HEBEAM Segway Videos
1 transistor balancing act (4 MB). This is a two-wheel balancing robot. One can think of it as a HEBEAM Segway.
2 wheel balancing using IR (0.8 MB). This second two-wheel balancing robot uses IR sensors for detection.
1 transistor, 2 wheel balancing, with IR (0.6 MB). This video shows a smoother run for the IR balancing robot.
Circuits
High Entropy BEAM. OISM Bicore with dual PWM speed/torque control.
{kind=link}
PWM Motor Control. Tom Jenner, "Simple HEBEAM Motor Control", 10 Dec 2005.
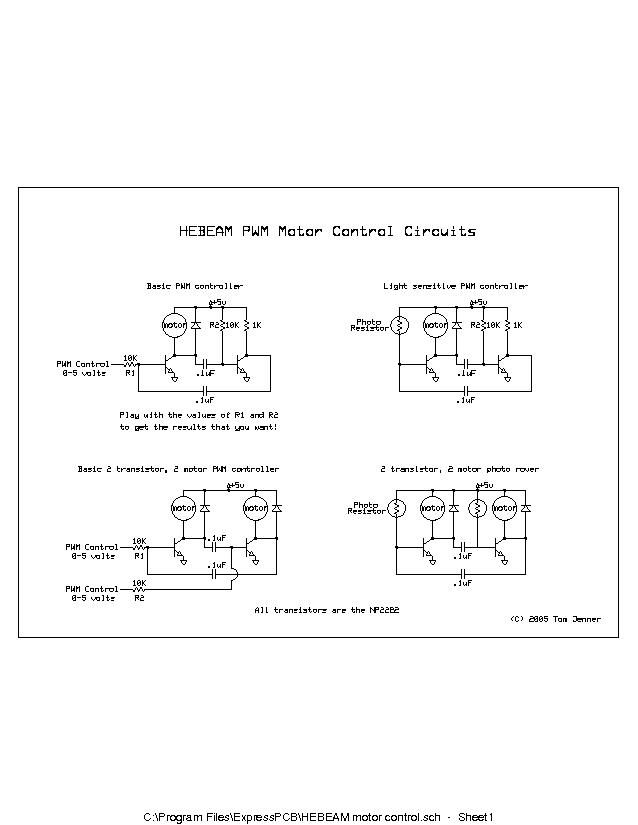{kind=link}
{kind=link}
6 Transistor, 2 Motor Rover. Tom Jenner, "Improved HEBEAM 6T, 2 Motor Chaos Rover", 11 Dec 2005.
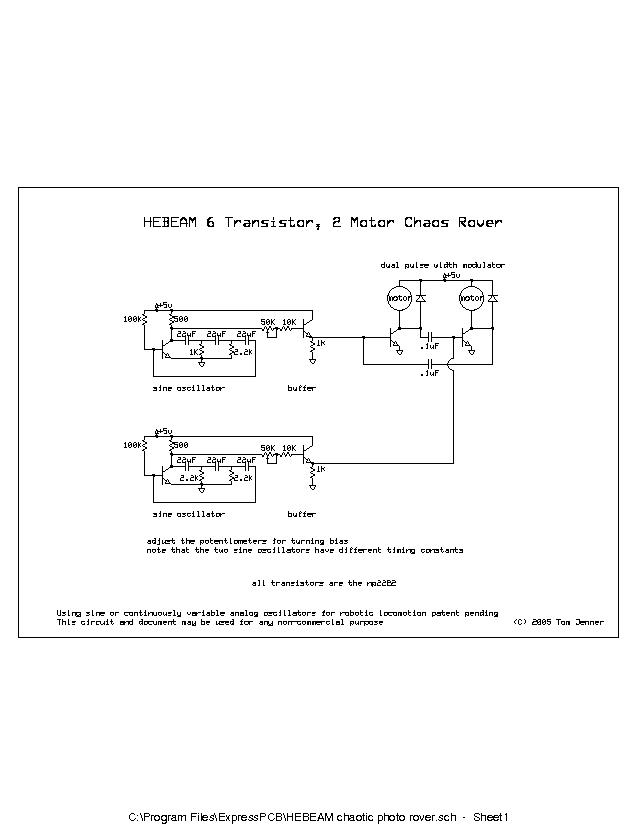{kind=link}
Differential PWM motor drive. Along the same lines as HEBEAM, this motor driver could be coupled with OISM sine generators. Wilf Rigter, "Re: New file uploaded to beam", 12 Dec 2005.
{kind=link}
2 Transistor Chaotic Motor pulser. Described by Tom in this post.
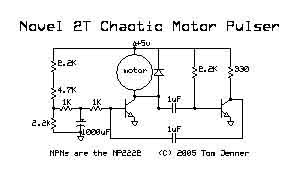{kind=link}
2 Axis Helicopter. Tom Jenner, "HEBEAM Helicopter ", 18 Dec 2005.
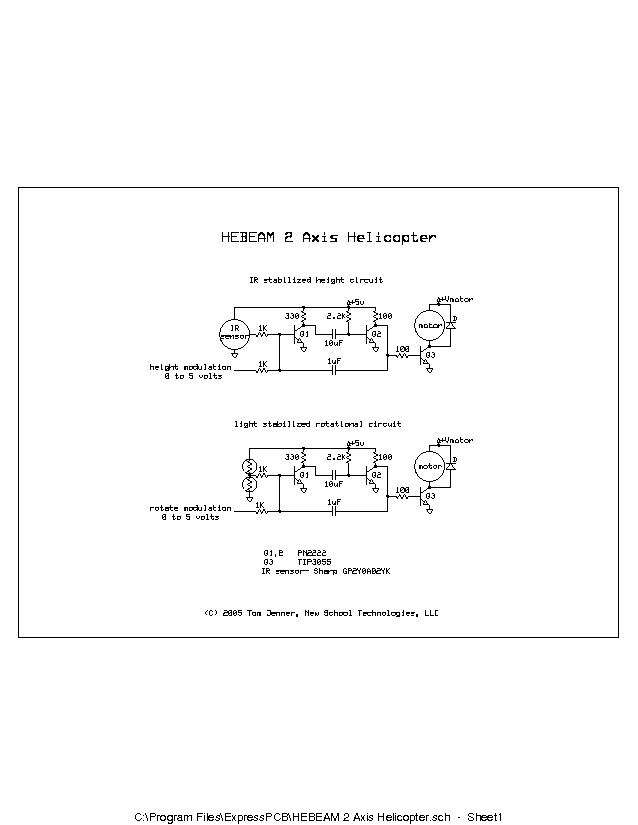{kind=link}
5 transistor helicopter controller. This uses a P-D controller circuit.
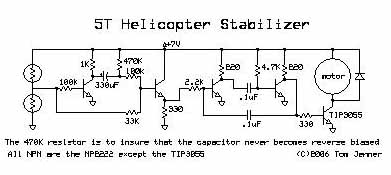{kind=link}
1 transistor balancing. This is the schematic for experiments in a 1T, 2 wheel balancing robot.
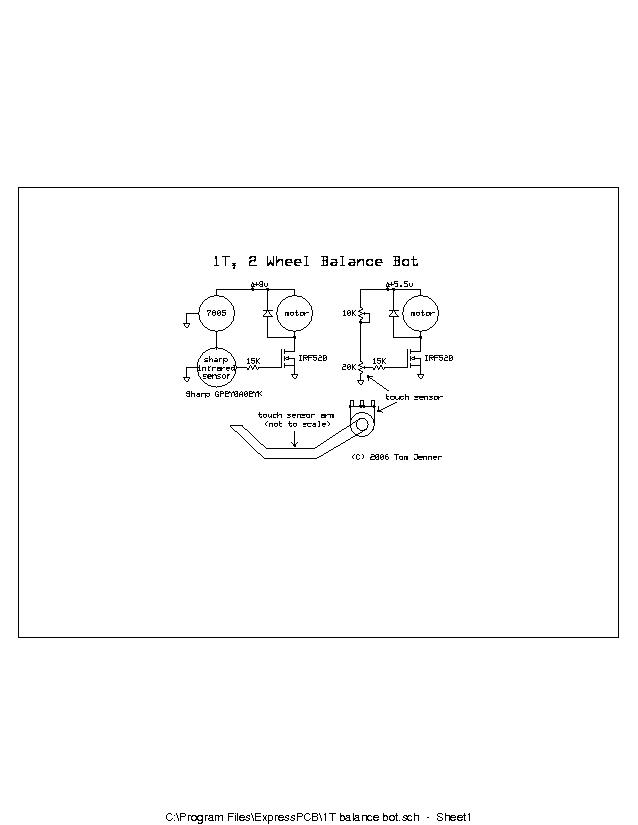{kind=link}
Copyright Information
Tom Jenner's videos and circuits come copyright by and courtesy of New School Technology. Please contact Tom Jenner if you wish to distribute or mirror this content. The Beam Member's videos fall under the Creative Commons License that governs this website.
Updates
Update (2005-12/12). Added the chaos rover and the second tank video.Update (2005-12/17). Added Tom Jenner's flight control video, Eric Cuzzort's rover videos, and the tank spirograph photograph.
Update (2006-01/03). Added a second helicopter video and the P-D circuit.
Update (2006-01/13). Tom Jenner's single transistor balancing robot, added video and schematic.