The Shark and the Tadpole
Shapour Shahidi is looking to build several underwater robots that can follow the ocean currents from Canada to Africa. Not all will make it, of course. The units must be inexpensive, durable, self-contained, and self-powered.
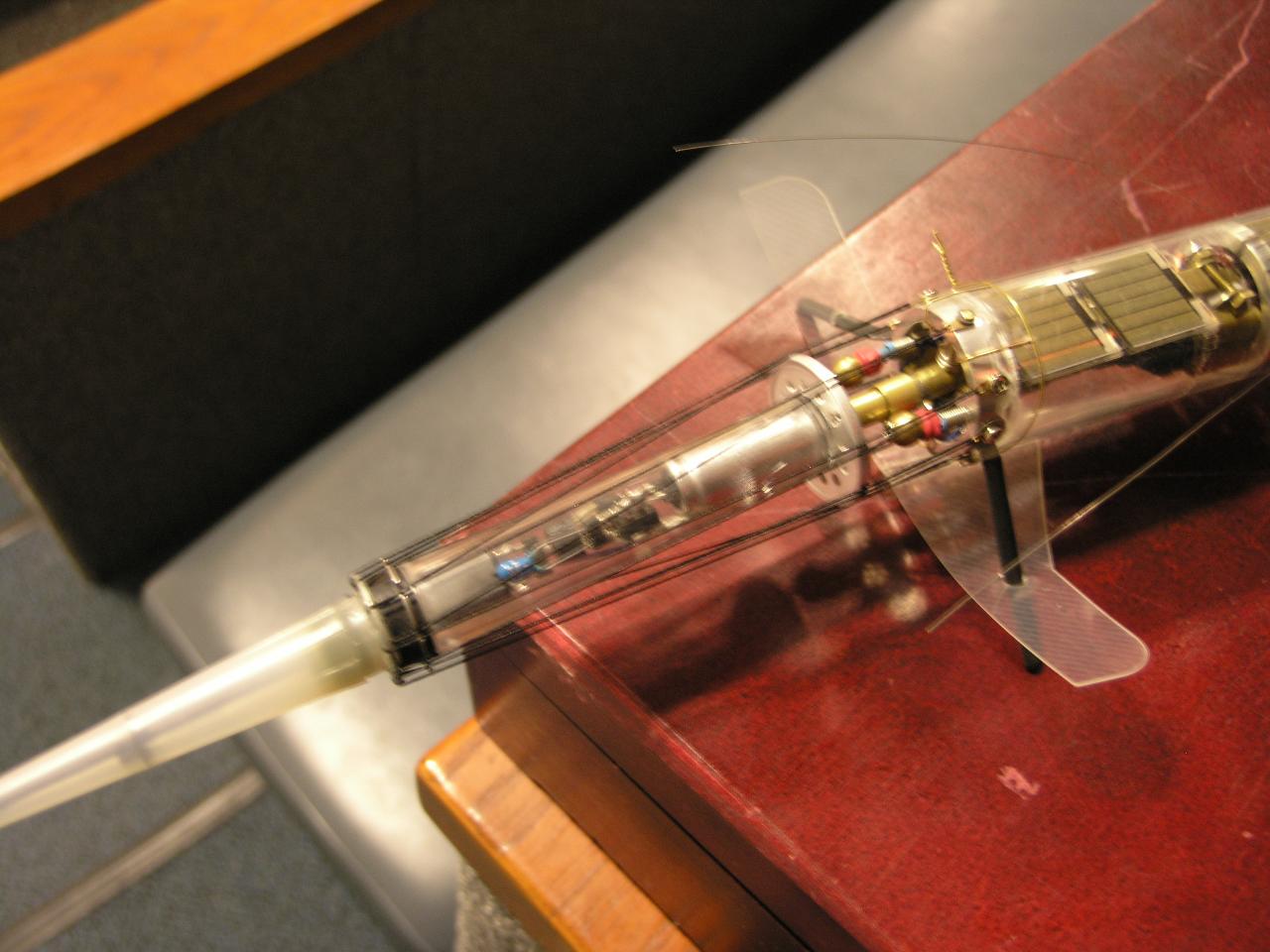
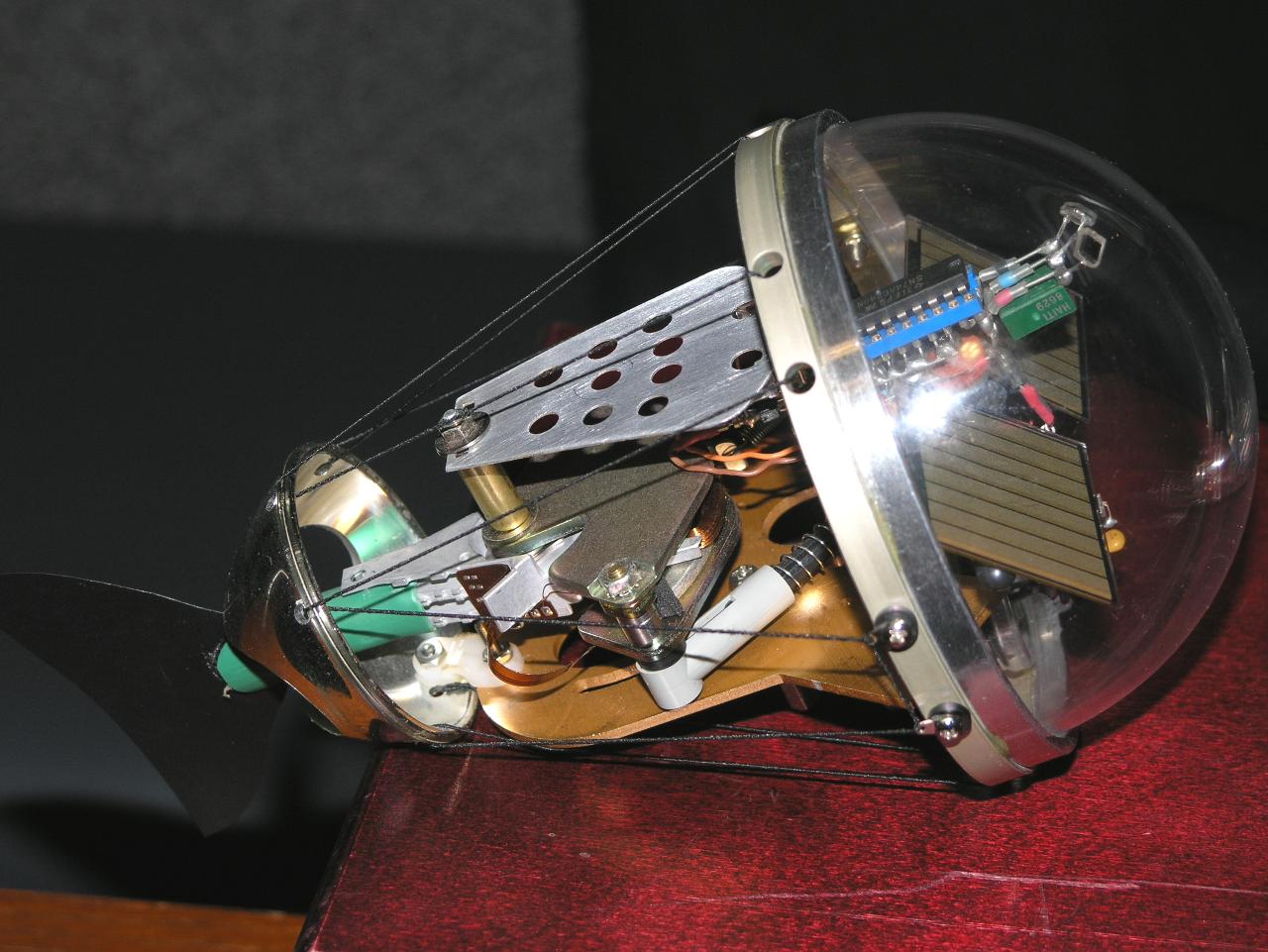
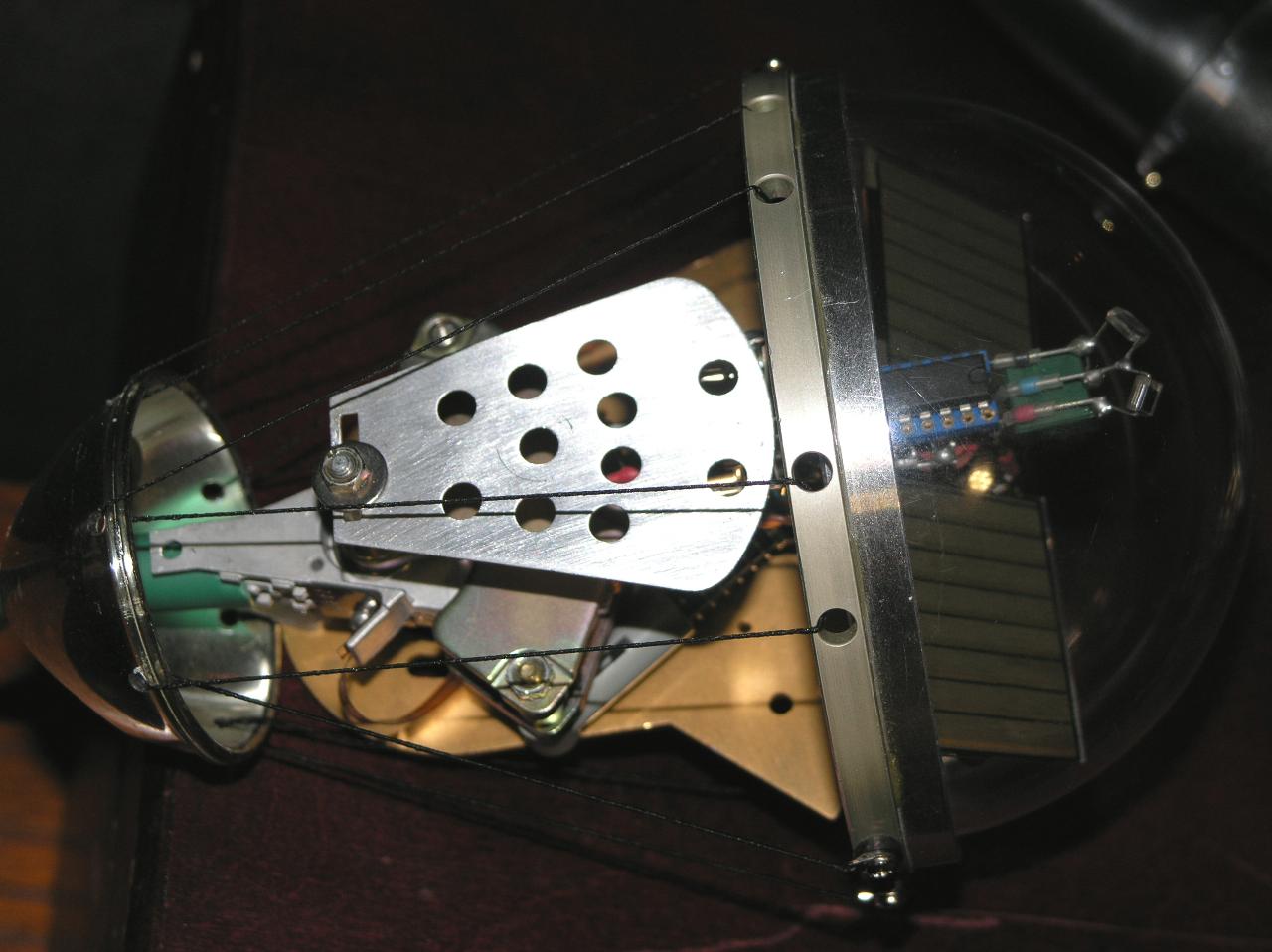
His first working model is Reef Shark. It is a BEAM submersible (aquabot? aquavore?) built along the lines of Scott Martin’s and James Mullins’ work. It has a propeller drive on an independent solar engine. A Fled Photopopper circuit articulates the waist and allows for steering. The Fled engines are very sensitive and put out a transmitter signal that can be picked up on the AM band.
One concern with Reef Shark, Shapour Shahidi told me, was that the propeller could jam with seaweed or other flotsam. Hence he set upon making a robot swim using a tail or fins.
Shapour’s next idea can be seen in Tadpole. While not water-proof, Tadpole clearly demonstrates a strong swimming motion. The control circuit is a Phototropic Bicore. The power, if I recall correctly, comes from the GQ Miller solar engine. The motor is a disk drive ejector mechanism.
Both Reef Shark and Tadpole are steps along the way to Sand Shark. Each step brings Shapour Shahidi that much closer to releasing his swimming creations into the oceans.