
Fish Hook Turbot Planning Notes
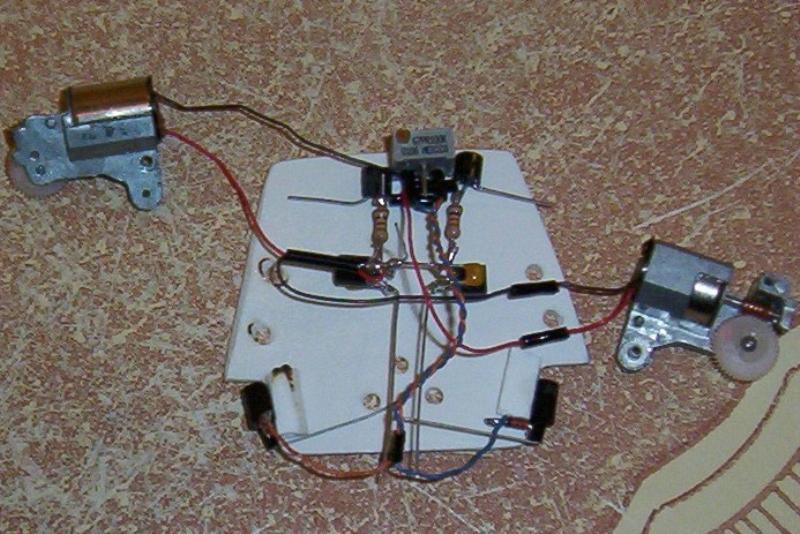
The electronics are coming from the Tumbler Nervous Net seen in the "BEAM Robotics: Step by Step" articles, SERVO Magazine.
The solar-powered Smiley Turbot, by Charles Green, has inspired the mechanics. He used two sections of 2mm Sintra and sandwiched in the electronics. He placed the flagella at 150-degree angles, or 15-degree insets. The only drawback to Smiley was that it used worm gear motors. These motors are prone to seizing and gave Charles a hard time.
Fish Hook will be bigger and brawnier than its solar-powered predecessor. Solarbotics GM7s will take the place of the troublesome worm gear motors. A 6V battery pack will replace the solar cells and 4700uF capacitor. Lastly, we have scaled the shell dimensions up to fit and are keeping the flagella at 150-degrees.
Around the time we are designing Fish Hook, the Yahoo! BEAM group is discussing functional aesthetics. The notion is making use of structures in such a way as to contribute to the robot’s operation as well as to its appearances. This BEAM aesthetic is finding its way into this Turbot.
We are going to give Fish Hook a shell of Sintra that will protect the electronics, enhance performance by increasing traction, and, with any luck, improve the overall appearance. The innovative aspect in Fish Hook’s design will be the use of a non-skid material. Other Turbots, notably Slipknot, often lose traction and slip in mid-flip. We are going to try to cover the Sintra shell with a layer of non-adhesive "Easy Liner" grip pad.
About the Name
Early versions of the Tumbler Turbot's Nervous Net had the motors connecting up to Vcc, not to Gnd as in the final version. This gave the schematic a narrow sweeping look, which then doubled back from the bottom. Joe took one look at Wolfgang's hand drawn scribbles and teased him about the resemblance to a fishing hook. When we went to build the Turbot, the name stuck.