
Flipper II Planning Notes
We have designed Flip Boy to address five main issues with the original Flipper.
1) Using a flexible lid provided difficult to work with and did not give the robot a clean, finished look. We will make a rigid frame using Sintra.
2) Placing the solar cell within the body greatly decreased the performance. We will place the solar cell on top of the body, and protect it using the wire ties and rubber feet.
3) Having the FLEDs facing each other did not work well for tracking light. We will have the FLEDs facing opposite each other, inline with the motor.
4) The worm gear motors seize up. We will remove the stop at the end of the worm gear box.
5) The rigid flagella appear to contribute to the motor seizing, and puts undo stress on the flagella-gear joint. We will use flexible, compliant flagella.
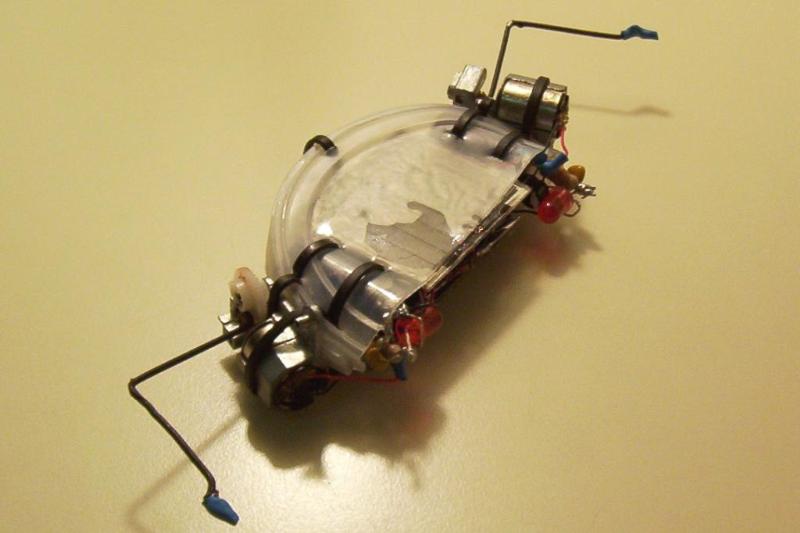
Here is a photograph of the finished Flip Boy and its parent robot Flipper.
