|
|
|
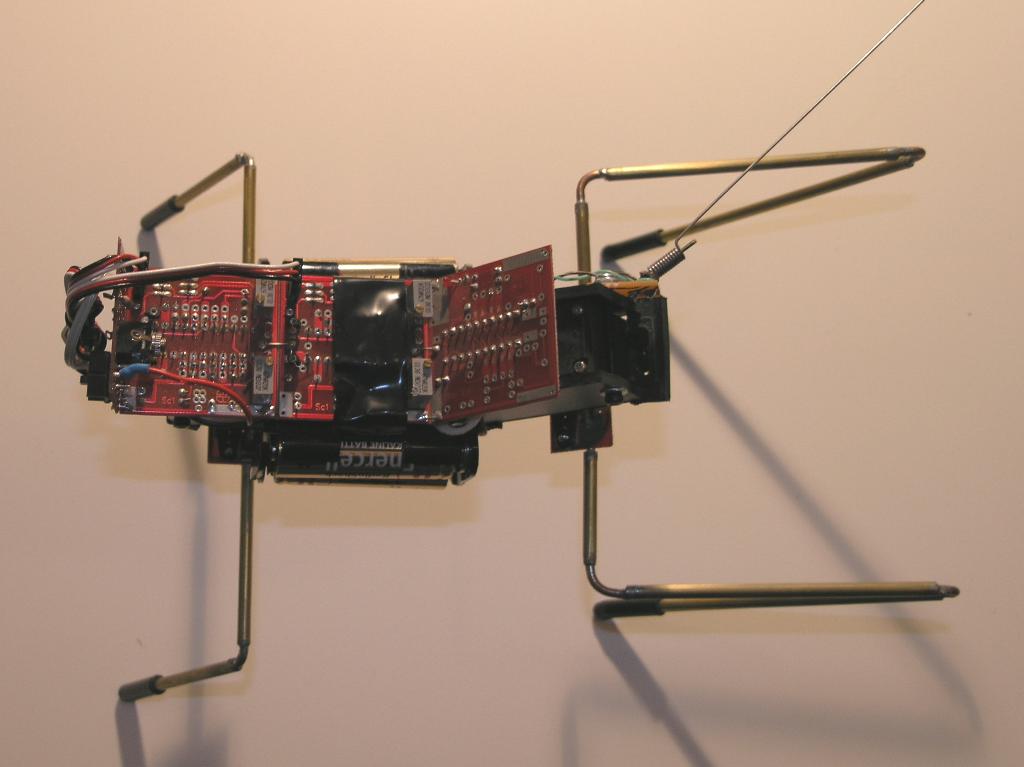
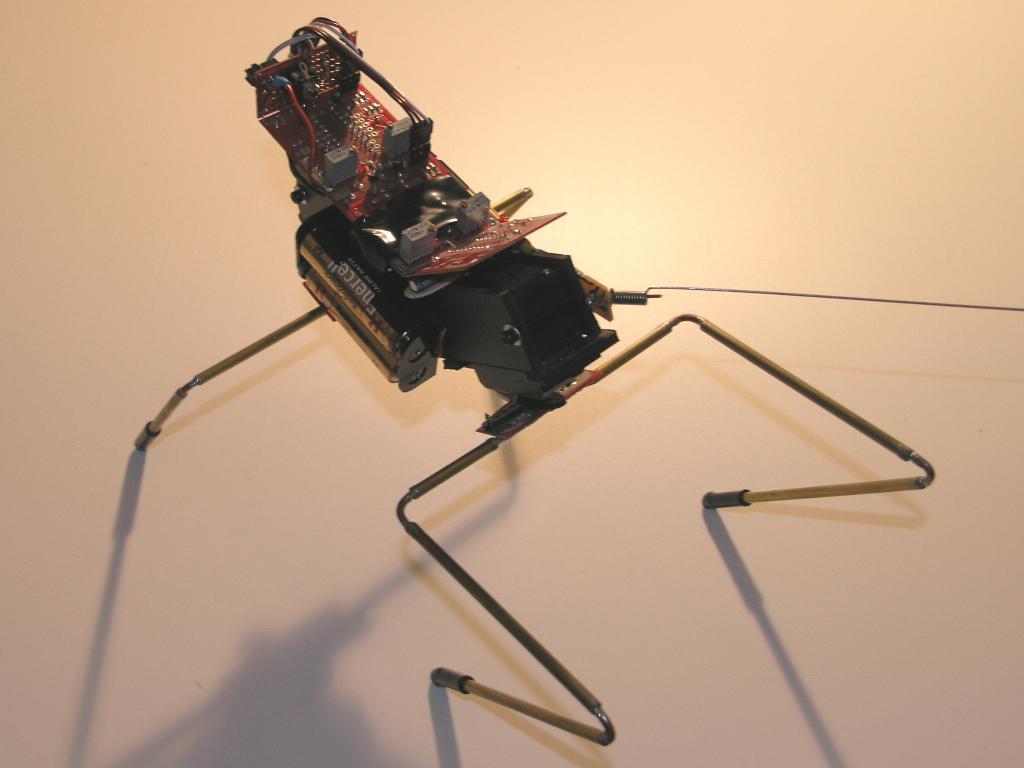
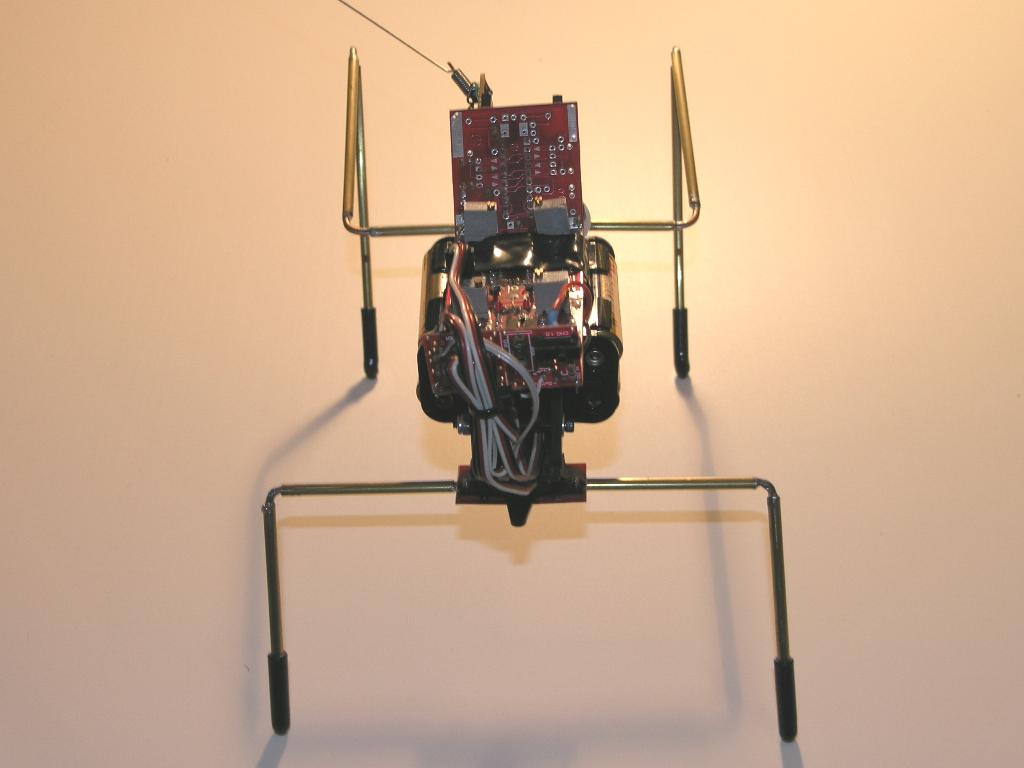
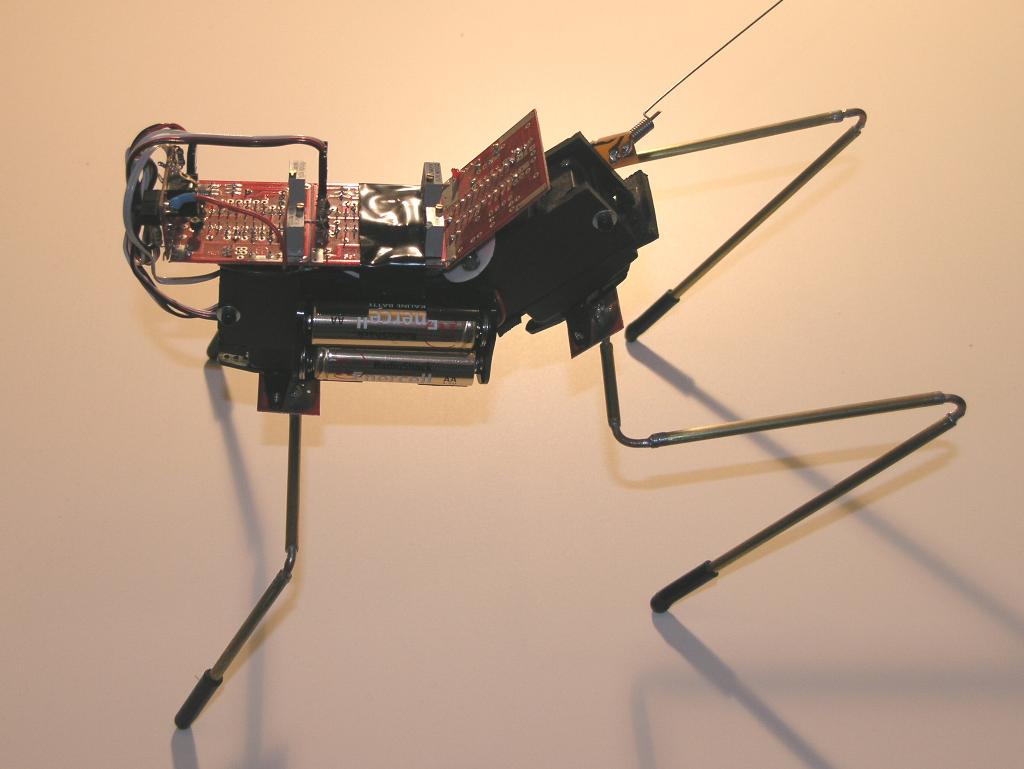
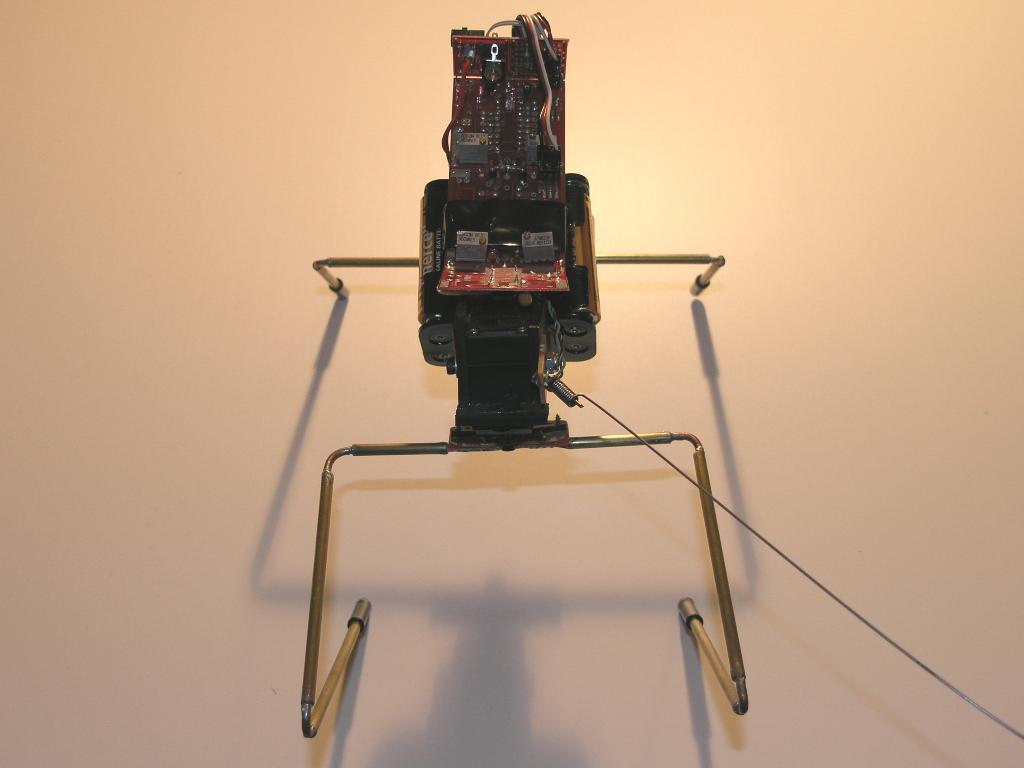
| Robot Design | 2-Motor Walker |
| Robot Name | The Forever Servocore |
| Completed On | 2005 March |
| Control Circuit | Solarbotics BEP Servocore with IMx (see link) |
| Power Source | Battery powered, 6V from four AA cells |
| Behavior(s) | Walking; Obstacle detection with reverse; Wall-following |
| Description |
Forever’s design comes from a Solarbotics BEP tutorial. What attracted us to this design was that it does not require mechanical stops or centering springs. We started this robot back in January 2004. We initially soldered the LEDs in reverse, a typical newbie mistake. Other projects came up and we put the walker on the back burner. Every month of so, Joe would ask, "so, are we going to finish that Servocore walker? We’ve been working on it forever!" We finally finished it in March of 2005, a scant 15-months after we began. I cannot help but wonder if this is a record for building a 2-motor walker. Whether it is or not, the name Forever is quite apt. |
| Competition(s) | Wolfgang competed with Forever at ECRG 2005. He took first place in the walker competition. Fastest run was 15 seconds on a smooth surface. |
| Additional Info |
 Solarbotics BEP Project Solarbotics BEP Project
|