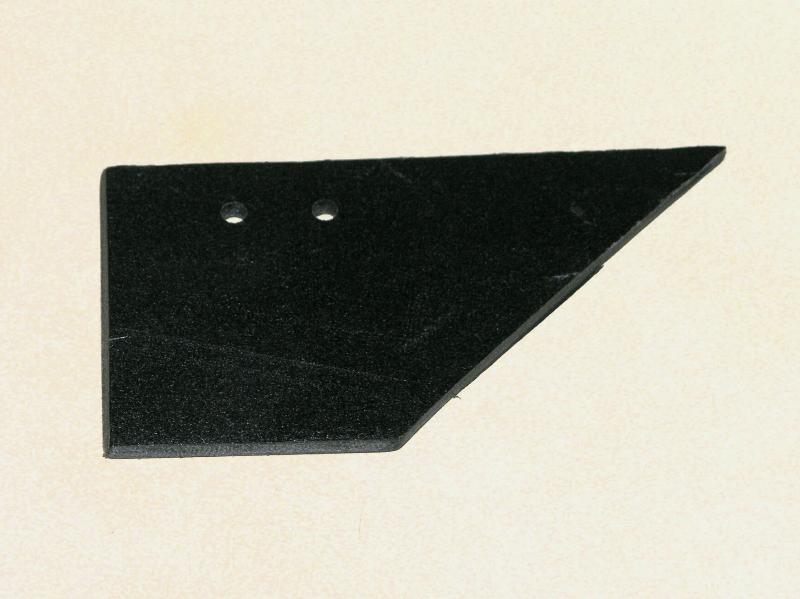
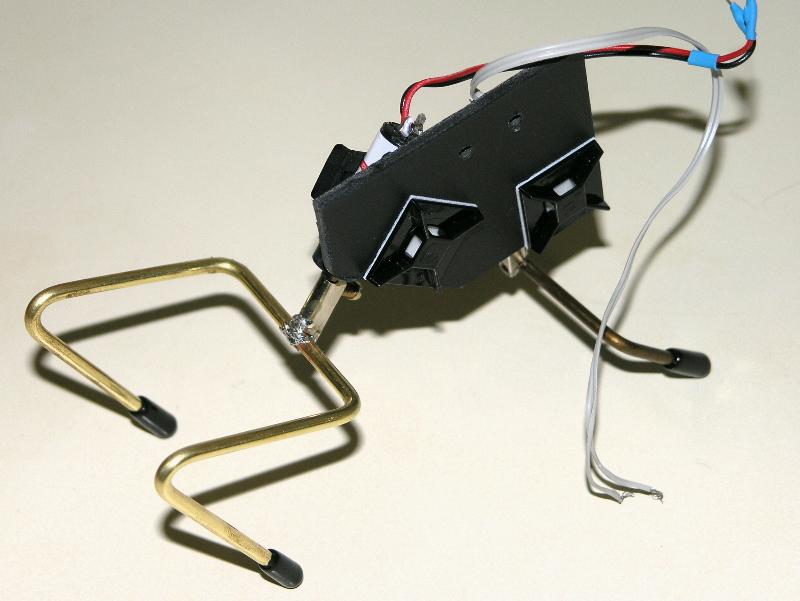
Cut out a 6 by 4 cm piece of Sintra. Cut the front on a 45-degree angle. Drill two 1/8Ē holes for feeding the motor wires thru.
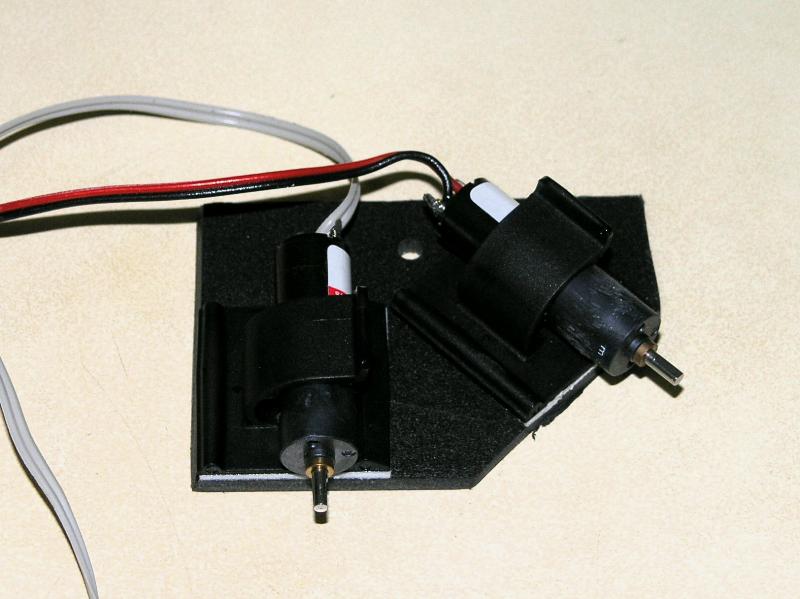
Use server rack wire guides (with double-sided sticky tape) to mount the motors in place.
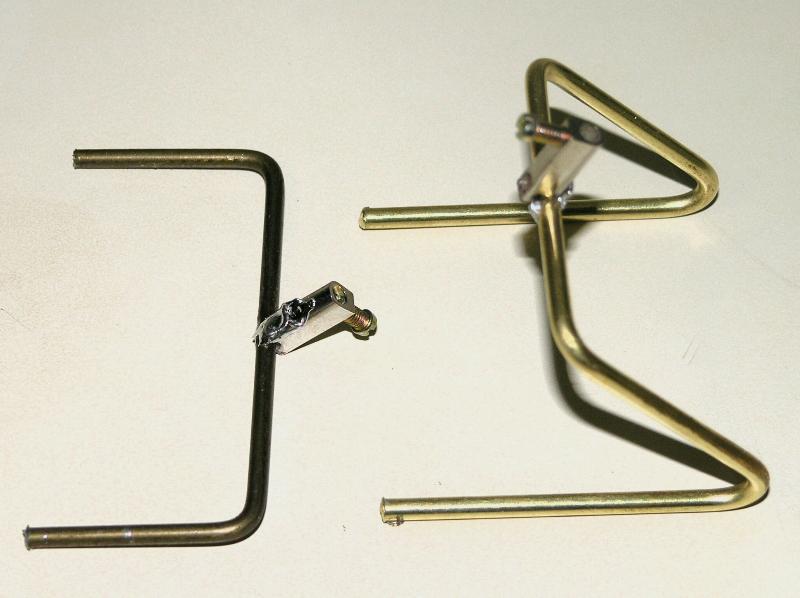
Shape the legs from 1/8Ē brass rod. Solder on terminal blocks for mounting the motors.
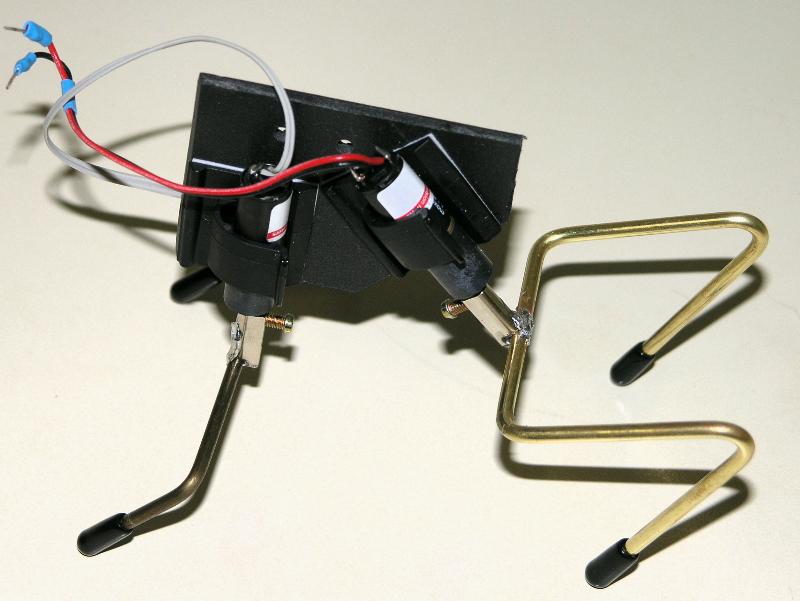
Attach the legs to the motors. Place server rack spacers (again, with double-sided tape) on the back of the walker. We will use glue the Bicores to these spacers.
Free-form two Bicores on 74AC240 chips. Configure them as in a Master/Slave arrangement. Use the Master Bicore to drive the front legs, Slave the rear. I used 1uF capacitors, 220K suspend resistor, 100K slave resistors.
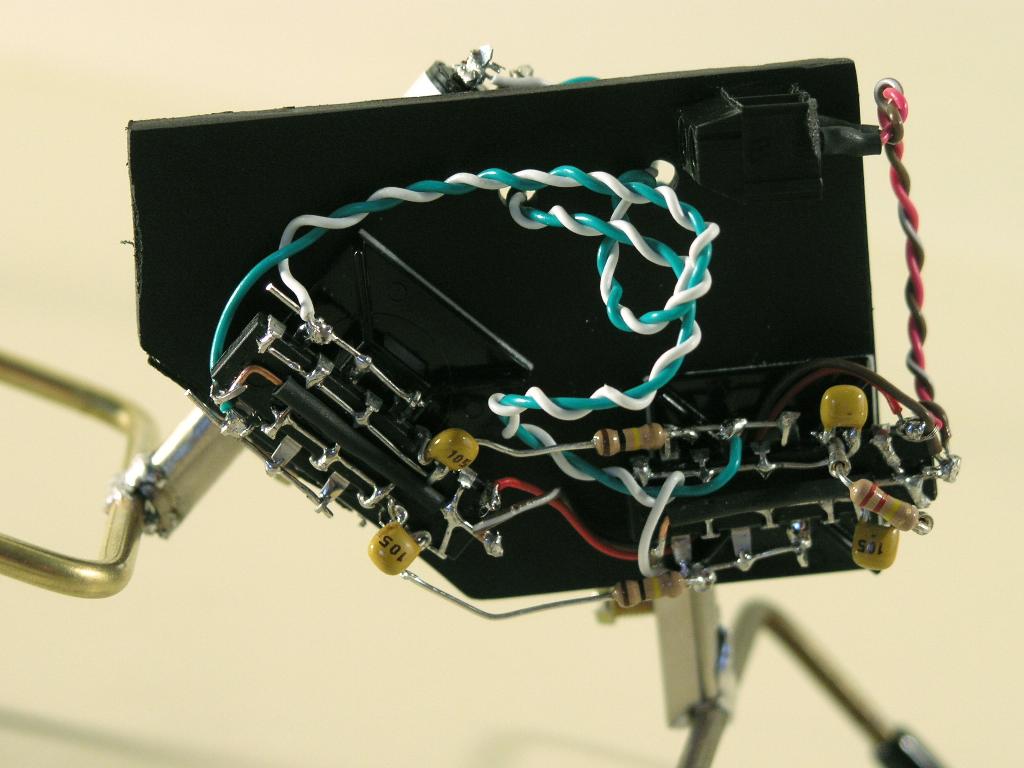
Glue the 74AC240 chips to the spacers. Solder and run wires to the motors.
Glue a black terminal block up above for the power tether. Solder and run power lines from the terminal block to the Bicores.
Lessons Learned:
1) Torque. These motors do not put out enough torque to walk properly. Even with using the light-weight construction materials and powering the walker by tether, Gecko barely twitches forward.