
Manta Ray Planning Notes
We built Manta Ray for the Eastern Canadian Robot Games Photovore Exhibition. In this contest, a Photovore must make it from one pool of light to another in a short period of time (5 minutes, according to the 2005 rules).
Ad hoc testing showed that a typical Photopopper (e.g. a two motor robot where the motor output shafts serve as wheels) would not be quick enough. On the Beam group, we were considering extending the time until Tom Gray piped up. His robot could make it in time.
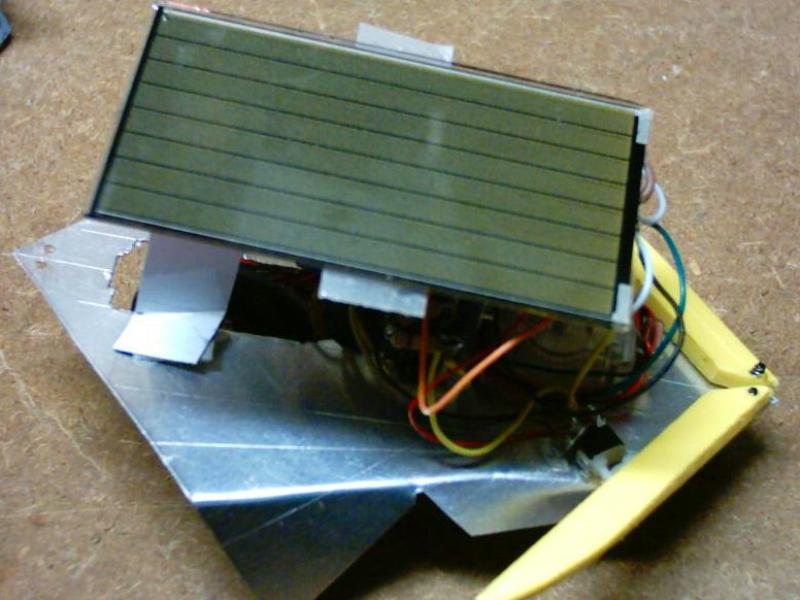
Tom Gray had built a PSPV or Beam bicycle. It was essentially a solaroller with steering. The aesthetics appealed to us, and so we decided to build a similar version.
|
For more on Tom Gray's robot, see:
http://beamdream.solarbotics.net/Photovores/PSPV/pspv.htm
For more information on the Photovore Exhibition:
http://www.robotgames.ca/rules/photovore2005.pdf
Advancing Thoughts
Manta Ray can be considered a good strategy, poorly executed. The idea of steerable solarollers is sound. Many solarollers today can make the meter in under a minute. Given a little direction, they should have no problem with the competition. Manta Ray does have a few faults, however.
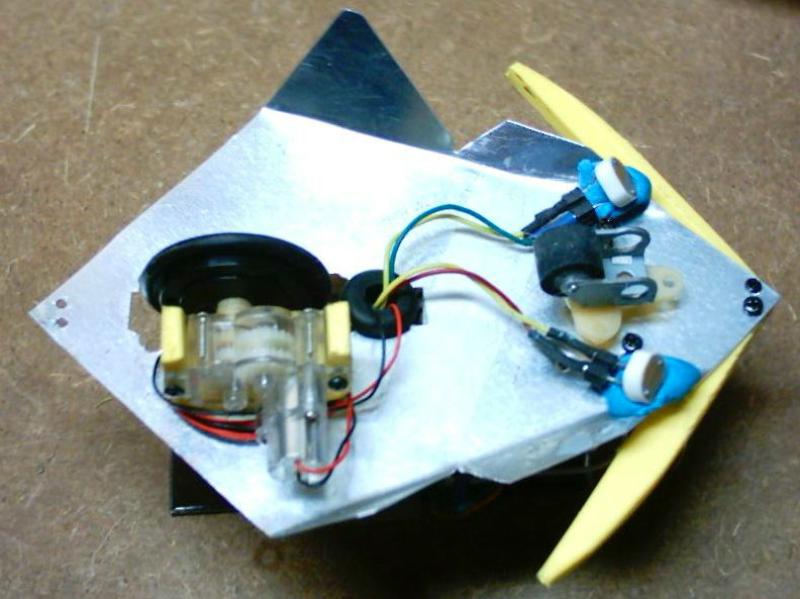
Almost all of the problems fall into the electronics category. The front steering motor moves very fast, resulting in hard left or hard right turns. The circuit is not very sensitive to light, meaning that the robot usually performs a sharp turn too late, missing the light source. The rear motor runs slow, meaning that Manta Ray is still not fast enough to be competitive. These added up to a forth place finish at ECRG 2005.
We are working on perfecting a new circuit for the 2006 event.