|
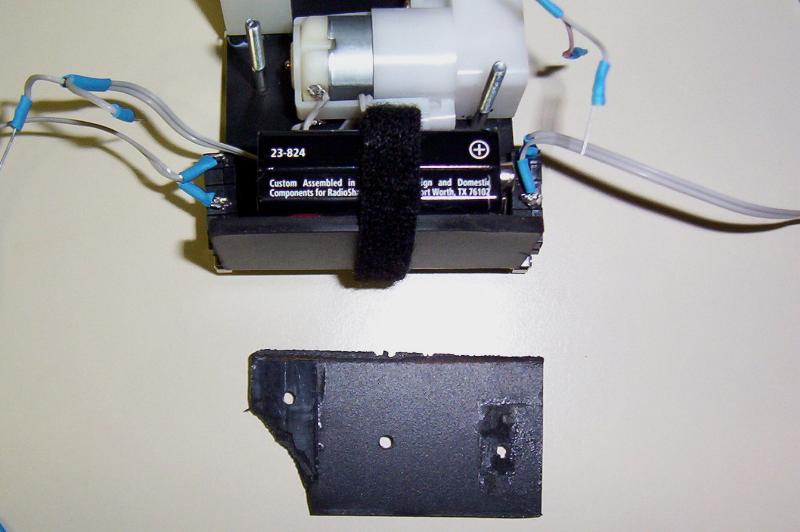
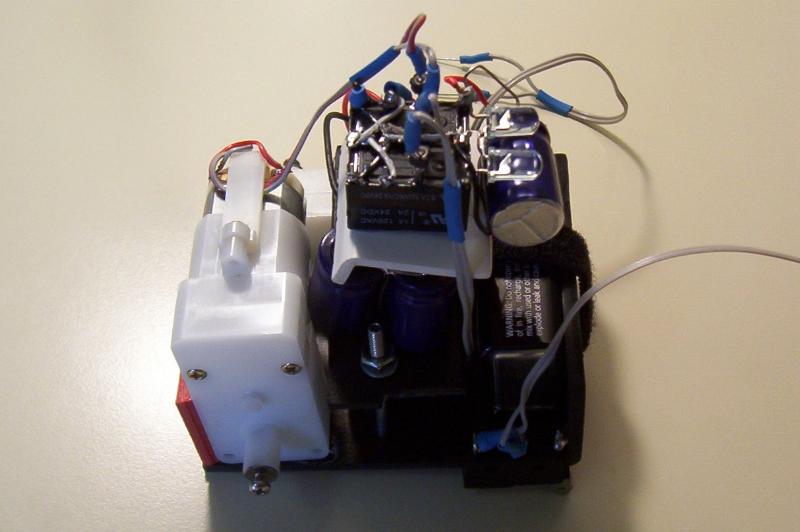
Use the template to cut out another section of Sintra for the circuit. Free-form the Junkbots relay circuit, glue it to the sintra, and bolt it onto the mini-sumo body. If this step seems condensed, it is because the circuit and Sintra are coming from an earlier mini-sumo. The work is already done, so there is not much to write about. |

|
|
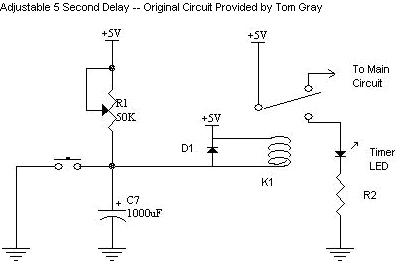
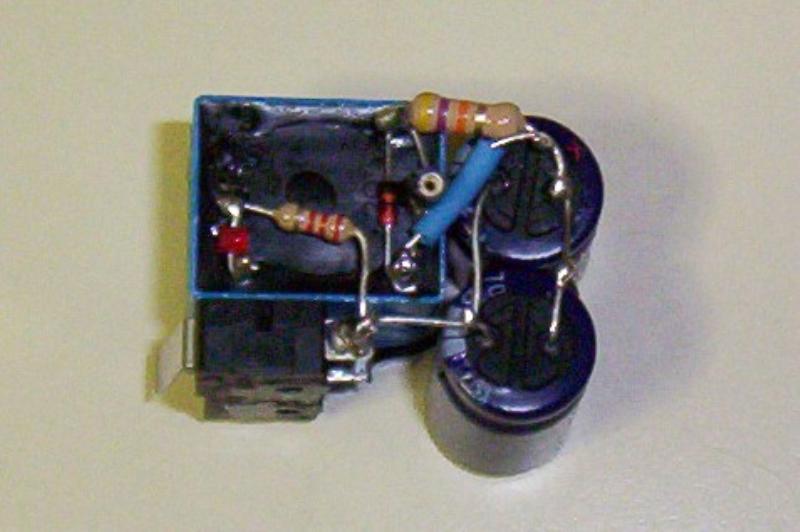
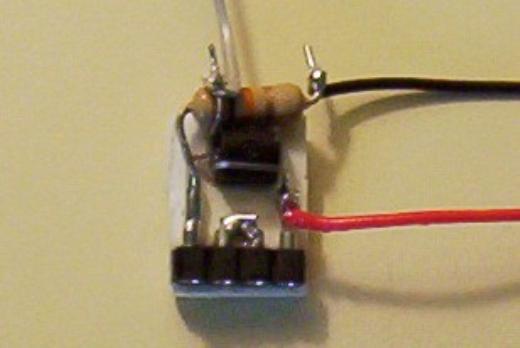
Free-form the timer circuit. Tom Gray provided us with this circuit. |

|
|
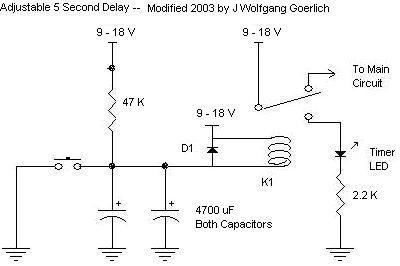
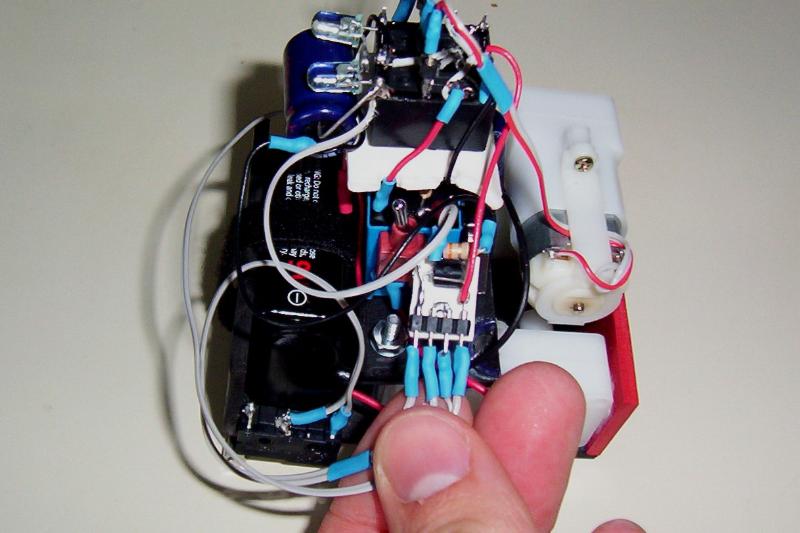
The timer circuit is too large to fit on the Sintra circuit base. Remove the relay circuit from the Sintra and glue down the timer. Create a second base for the relay circuit, glue the circuit onto that, and glue that onto the relay. |

|
|
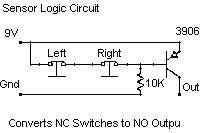
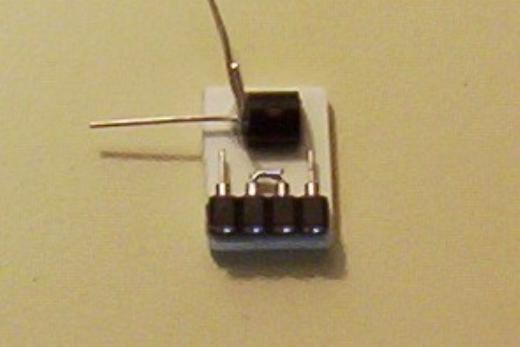
Build the edge sensor logic circuit. This converts the NC edge switches to the NO switches the Junkbots relay circuit expects. Test this using a 9V battery for red (+) and black (-). Connect the multimeter to ground and signal (gray cable) and measure the voltage. It will be near 0 when both edge switches are down, and near 9V when both are up. |
|
|
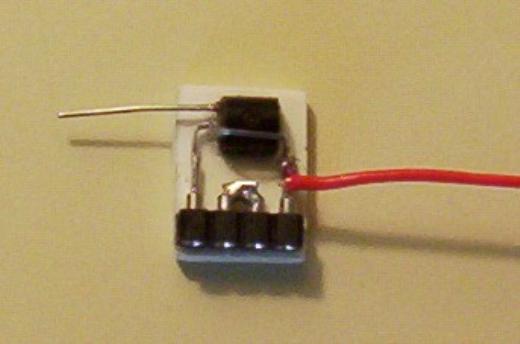
Solder the sensor logic circuit to the relay circuit. The sensor logic ground goes to the reverse capacitor's cathode. This is important as it will not work if connected directly to ground. The sensor logic signal goes to the capacitor's anode. The sensor logic positive goes to Vcc on the relay circuit. Turn on the robot and test it out. Both motors will go forward until either edge switch is opened. Then it will reverse and turn. |
|
Lessons Learned:
1) Room to grow. The first time we put this robot together we did not include a timer. When we had to redo it for the switch problem, we decided to include the timer so as to make this qualify for competitions. The relay that we used in the timer circuit was too large, necessitating us again redoing part of the body. Furthermore, it made the circuit unstable and thus this robot is still unsuited for competitions. In future designs, all components to be added must be purchased and inspected before building the body.
2) Touchy, touchy. The front still pops up a bit when moving forward. We have already adjusted the weight to compensate mechanically. Future versions of the circuit will compensate electronically by disabling the edge detection when changing direction or when in contact with the opponent.