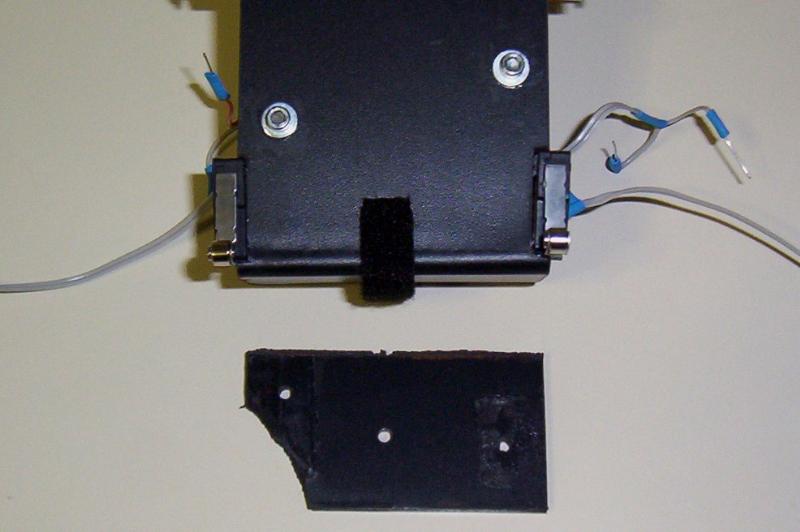
Cut a section of Sintra measuring 6 cm by 11 cm. Bend the Sintra at a 90-degree angle to form a "battering ram" measuring 3 cm from top to bottom. Sand the edges smooth.
Cut a gash near the middle of the width and about 1 cm from the battering ram. This gash must be big enough to fit the velcro thru. Then cut two mounts for the roller switches. These cuts are 3 mm deep by 2 cm wide, and are right behind the battering ram.

Attach the roller SPDT switches so that the wheel is toward the front battering ram.

Cut a piece of wire from a floppy drive cable. Solder the wire onto the motor, and then make pins for the motor attachments using legs from capacitors.

Cut two more pieces of wire and solder them onto the switches. These are positioned to be live, high, on, when the switch is depressed. Make pins as we did for the motor attachments.
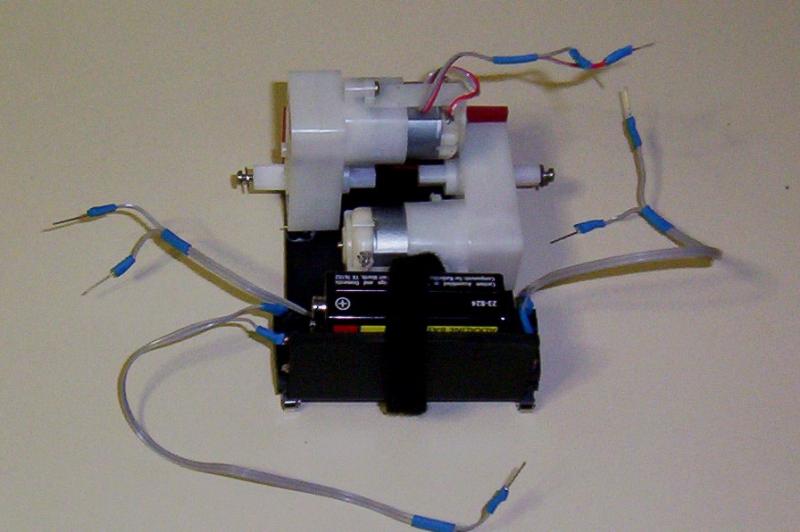
Glue down the GM2 motors. We used the same alignment as used in Junkbots Book, Figure 12-44 on page 272. Use the red Sintra to brace the rear of the motors.
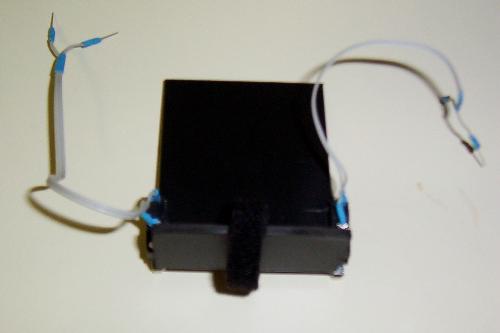
Velcro down battery to the battering ram. Battery ram, get it! Ha, ha. Oh, never mind -- Joe did not find this funny either.
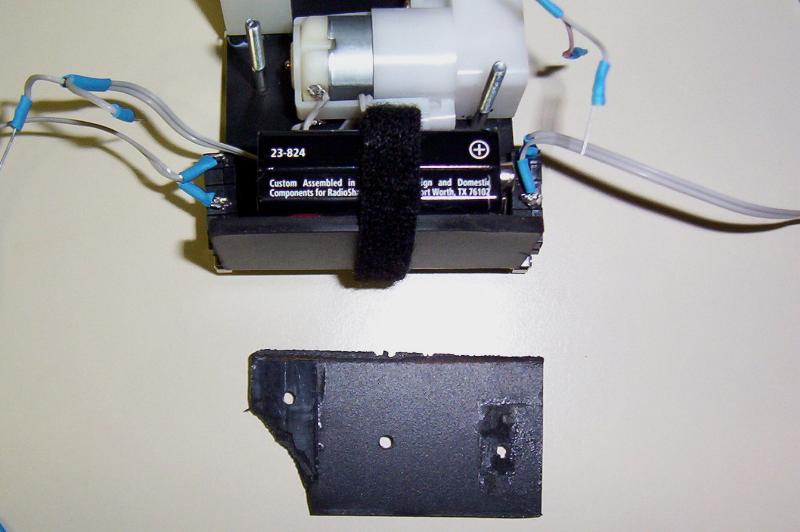
Cut a piece of scrap and tape it onto the bottom of the case. Drill two 7/64" holes: centered between the battery and motor on the left, between the motor and the battery on the right. Untape the Sintra and put it aside. We will use this as the template for the relay circuit and future circuits.
Put a flat washer on two of the socket head screws, then feed the screws thru the holes. Glue them down.
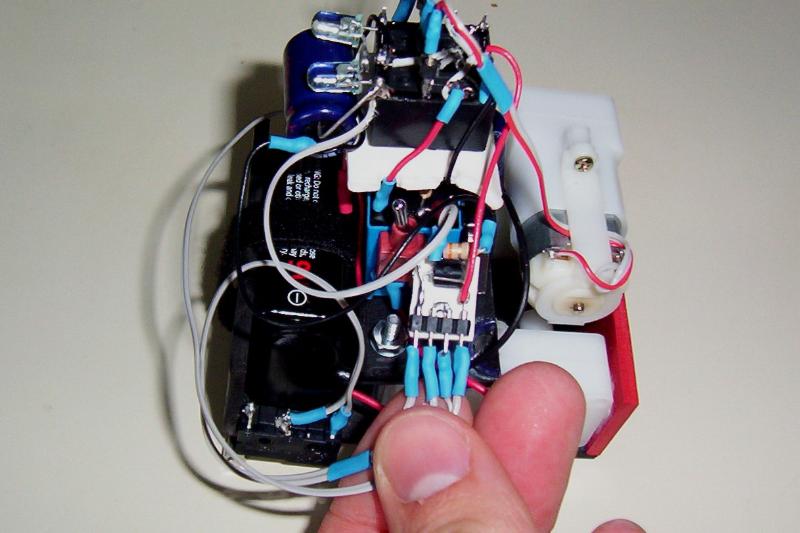
Build the control circuit. Click on the link below to see images for the various circuits that we have tried.
Turn on the robot and test it out. Both motors will go forward until either edge switch is opened. Then it will reverse and turn.
