Adaptive Bicore Biomech Motor Controller (Abcore)
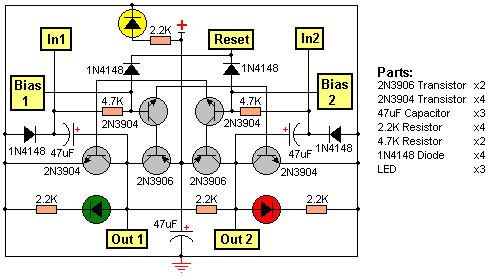
Mark Tilden introduced the Abcore in the Junkbots, Bugbots, and Bots on Wheels book. Given a DC motor with a winding resistance > 10 Ohms, the Abcore is a self-oscillating H-Bridge motor driver.
Circuit Variations
- Headbots. "Replace the 4.7K internal biasing resistors with CdS photoresistors for phototropic oscillations (ideal for headbots). No further electronics required." (Page 336).- Biasing and balancing. Place a 100K Multi-turn Trimpot between the bias points and Vcc. Use the trimpot to bias the Abcore or balance the oscillations.
- Timing. The default oscillation period is around 4 seconds. Place a resistor across the inputs to adjust this time period.
- Master/Slave. Run a 1K or higher resistor from the output of one Abcore to the input of the next to create a M/S pair.
PCB -- Steve Jones' Abcore Boards
Click here for instructions on building the Abcore board.
Useful for building:
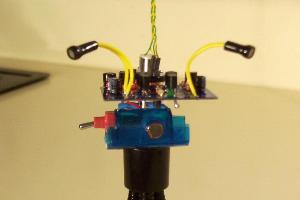 |
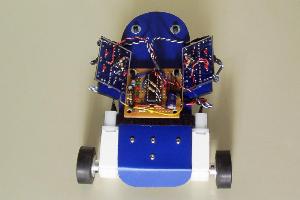 |
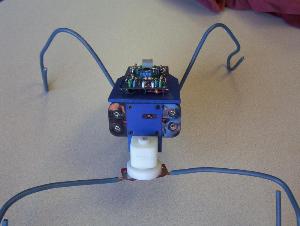 |
 |